DESARROLLAN UN ROBOT INSPIRADO EN PULPOS PARA OPERAR BAJO EL AGUA
Investigadores del Instituto Italiano de Tecnología han creado un brazo robótico que utiliza ventosas para manipular objetos en entornos submarinos.

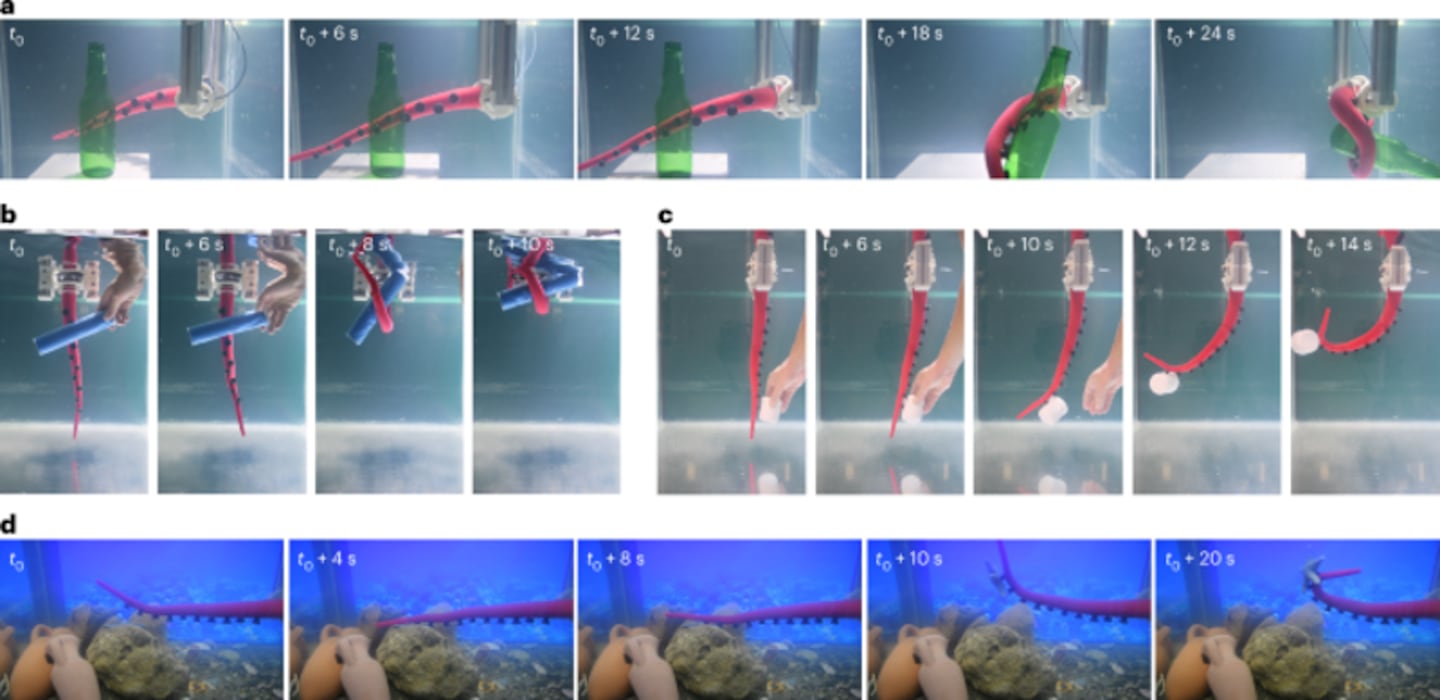
Un grupo de investigadores del Instituto Italiano de Tecnología (IIT) ha diseñado un innovador robot inspirado en el pulpo, destinado a funcionar en entornos submarinos. Este autómata, que destaca por su bioinspiración, utiliza un brazo mecánico equipado con ventosas que le permiten recoger y manipular objetos bajo el agua.
La bioinspiración en la robótica es un campo en constante evolución, y el pulpo ha sido elegido por su capacidad para interactuar con su entorno de manera única. Según los desarrolladores, los océanos son un vasto recurso de soluciones naturales que pueden enriquecer la robótica del futuro. Barbara Mazzolai, directora asociada del IIT, afirma que “los océanos albergan algunas de las soluciones más sofisticadas de la naturaleza”.
Este robot, que pertenece a la categoría de robots blandos, se diferencia de los modelos tradicionales por su uso de materiales deformables, lo que le permite una interacción más natural, incluso con seres humanos. El diseño del prototipo proviene de la unidad de investigación de Robótica Blanca Bioinspirada.
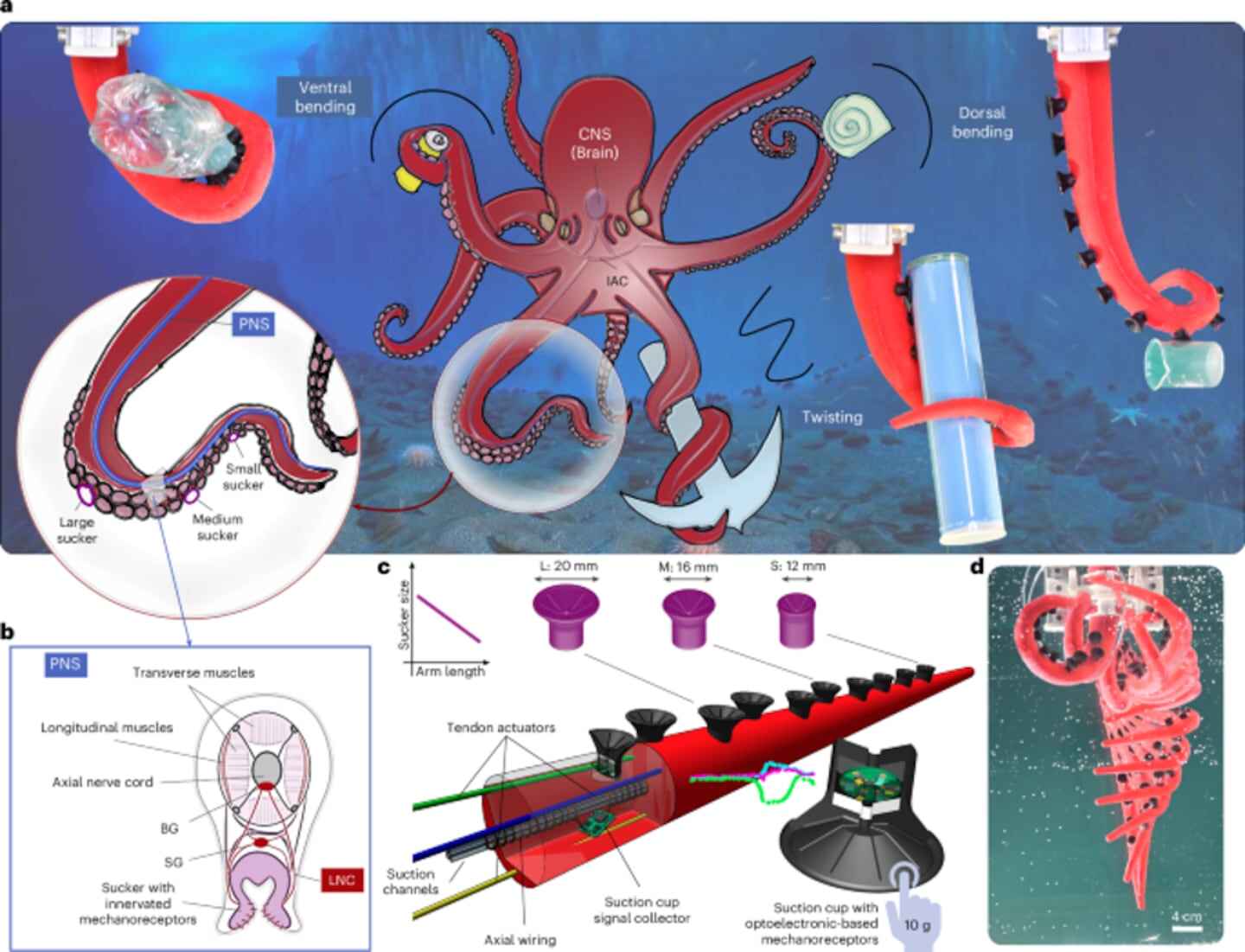
Mazzolai explica que la innovación principal radica en la integración de percepción y acción a través del cuerpo del robot, permitiéndole interpretar el contacto y ajustar su agarre de forma autónoma. Las ventosas de silicona están equipadas con sensores que detectan el contacto y calculan la fuerza necesaria para manipular objetos.
El sistema es capaz de operar en entornos complejos gracias a su diseño modular, que permite ajustar la cantidad y ubicación de las ventosas según las necesidades específicas. Emanuela Del Dottore, primera autora del estudio, destaca que “el brazo reacciona al contacto en tiempo real y con precisión, sin depender de un control centralizado”.
El funcionamiento del robot se basa en la deformación de las ventosas al entrar en contacto con un objeto, lo que genera un cambio en la luz emitida por LEDs internos. Esto permite al sistema calcular la fuerza y dirección necesarias para recoger el objeto.
Los investigadores ven un amplio potencial para este tipo de tecnología en aplicaciones del mundo real, que abarcan desde la manipulación de elementos delicados hasta el mantenimiento en entornos acuáticos. A futuro, el equipo del IIT planea expandir la variedad de objetos que el robot puede manipular y aumentar su capacidad de carga.
Este avance en la robótica blanda ha sido documentado en un artículo publicado en la revista Nature Machine Intelligence.